
从看见,到触感真实-开普勒国内首发 VTLA 全感知原生力触觉全栈数采方案
上海2026年4月21日 美通社 -- 2026 年 4 月,北京亦庄机器人马拉松火热举办,行业迎来新一轮技术展示热潮。当下机器人领域正呈现鲜明的专业化分工:跑步机器人专注运动性能优化,表演机器人侧重姿态与交互,而开普勒机器人,始终聚焦工业实干,做真正能在产线上创造价值的实用型机器人。
同月,上海开普勒机器人正式发布国内首个原生适配 VTLA 全感知模型的力触觉全栈数采解决方案 Kepler-OmniTac™。方案由开普勒全栈自研,涵盖新一代数采套件、Kepler-OmniVTLA 大模型及原生数据集,可直接采集原生力触觉全模态数据,实现机器人边工作、边数采,在真实工业场景里边训练、边进化。
这一发布,标志着工业人形机器人正式从以视觉为主的 VLA 时代,迈入更贴合生产实际的 OmniVTLA 时代。我们始终专注工业落地场景,致力于构建真正实用的全感知智能机器人体系,补齐机器人长期缺失的 “物理交互能力”,推动行业从炫技展示走向务实量产,向更智能、更可用、更能干活的方向持续迈进。
一、数据驱动,开普勒具身智能迈入 Gen3.0 时代
开普勒机器人对具身智能的探索,始终以落地价值为核心锚点。开普勒CEO 宋华曾多次公开表示:“早期大模型等 AI 技术尚未成熟,行业内多数数据采集停留在实验室环境,产出的‘完美数据’与真实工业场景脱节,既无法支撑机器人完成复杂操作,也导致企业投入产出比极低,难以形成规模化落地能力。”
基于这一判断,开普勒为自研的 KeplerBrain 类脑系统™ 规划了清晰的三阶演进路线:
- 20212023 具身智能 Gen1.0:以规则驱动模型为核心,聚焦封闭场景完成基础作业验证,实现 “无泛化但稳定可靠” 的核心目标,夯实工业级稳定基础;
- 20242025 具身智能 Gen2.0:升级为数据驱动 AI 模型,在原有封闭场景中实现 “有条件泛化”,可适配同类场景下的小幅变量调整,实现场景内灵活适配。
如今,人形机器人行业迎来关键拐点:执行器、整机控制、灵巧手等硬件已实现规模化突破,躯体成熟,智能待启。但行业仍被三大痛点牢牢束缚:
- 感知维度缺失-纯视觉方案无法捕捉接触力、摩擦力等物理交互信息
- 力触觉数据稀缺-缺乏全维度接触数据支撑精细操作
- 模型与数据不匹配-主流模型原生不支持触觉模态
机器人普遍 “看得清、摸不准、做不精”。
依托早些年已完成的本体全栈布局与大量封闭场景落地经验,开普勒正式宣告:迈入KeplerBrain具身智能 Gen3.0 时代 以海量真实数据驱动端到端大模型,实现通用场景、完全泛化。
开普勒明确判断:工业人形机器人的下一程,不再拼硬件,而拼感知与数据。物理世界感知 + 高保真交互数据,将成为真正的核心竞争力。
为此,公司坚定采用“具身智能大脑 + 力触觉全栈数采” 双轮驱动战略,放弃 “广而浅” 的横向泛化,深耕工业垂类纵向泛化路径,用真实场景数据破解行业智能瓶颈,让机器人真正实现 “会摸、会懂、会做”,升级为具备真实物理世界感知与决策的工业智能体。
二、原生 VTLA,打造触觉 + 六维力全感知
本次推出的 Kepler-OmniTac™ 力触觉全栈数采解决方案,由自研Kepler-OmniTac 数采套件、Kepler-OmniVTLA 数据集、KEPLER OmniVTLA 大模型端到端打通,核心是 “人机同源感知”*,国内首个实现 “硬件 - 数据 - 模型” VTLA 原生适配的工业级方案。
不止能看见,更懂推拉拧
Kepler-OmniTac 数采套件为开普勒全栈自研,采用双方案并行架构,整体轻量化设计,可快速适配各类真实工业场景。
1. 开普勒同构力触数采套件
由 “同构力反馈外骨骼 + 力触反馈手部套件(夹爪 五指手套)+ 开普勒人形机器人(夹爪版 灵巧手版)”组合而成。
- 核心优势:动作空间与机器人高度一致,可原位采集高保真力控与接触数据,减少人机形态差异,在滑移、稳定性、材料区分、顺应控制等信号采集上表现优异。同时通过本地 - 边缘部署、通信优化、温度补偿、自校准等技术,有效抑制延迟、温漂与噪声,数据稳定可靠。

2. 类 UMI 触觉手套数采套件
以五指触觉采集手部套件为核心,可灵活搭配外骨骼扩展使用。
- 核心优势:大幅降低采集门槛与硬件成本,无需昂贵机器人即可快速采集大量人类演示数据,适合数据集扩容与算法快速验证。通过多机型映射、策略蒸馏、多视角融合等技术,缓解人手 - 机器人差异与视角遮挡问题,低成本兼顾数据质量。
双套件协同,高质高效全覆盖
- 同构外骨骼搭配力触手部采集套件实现精准动作映射与力觉反馈,保障遥操作数据高保真;
- 触觉手套兼顾低成本与数据多样性,提升采集效率与覆盖度。
两者互补配合,可灵活覆盖不同场景、不同精度需求的全品类数据采集任务,为 OmniVTLA 大模型训练提供高质量、高多样性的多模态数据支撑。

海量真实数据,筑牢感知底座
Kepler-OmniVTLA 数据集,基于自研采集设备原生采集构建,自带 “真实无虚、多元覆盖、全模融合、规模领先” 四大特质,数据储备堪称丰厚:累计收录 10 万 + 条真人实采全模态场景数据,覆盖商业、工业、办公、家居等多行业核心场景,囊括20+种专属工业技能与 40 +种真实应用场景,真实还原核心场景全链路任务。
从 VLA 到 VTLA,一脑适配多机
KEPLER OmniVTLA 大模型,实现 VLA→VTLA 关键升级,将力触觉模态提升至与视觉、语言、动作同等核心地位,原生支持力触觉编码与跨模态深度融合:
核心突破:从 “被动看” 到 “主动摸”,精准理解接触力度、材料软硬等物理属性,柔性 易碎工件操作 “不翻车”;
能力跃迁:模仿学习 2.0 落地,告别单纯 “抄动作”,深度 “懂逻辑”,复杂任务泛化能力 “翻倍涨”;
实用价值:一脑多机高效适配,通过多机型目标映射与策略蒸馏,一套模型可兼容不同自由度、不同结构的人形机器人,无需重复开发,大幅降低部署成本;
工业实效:接触密集型任务成功率提升 10%-20%,试错成本 “砍一刀”,已在汽车、3C 等行业真实工厂完成 POC 验证,彻底补齐工业人形机器人感知短板。

三、边工作、边数采、边训练、边进化
当前机器人训练的核心数据,多以纯视觉数据和虚拟合成数据为主。虚拟数采场、集中式基地产出的理想化数据,脱离了工厂的真实环境 不同材质的零件、复杂的光照遮挡、动态的生产流程,让这类数据在工业场景的泛化成功率仅【25%-30%】;而纯视觉数据存在天然盲区,无法感知力、触等物理信息,在精密装配、多材质抓取等精细操作中,几乎不具备实用价值。
传统遥操作数采作为 “人工主导的离线采集模式”,同样未能解决数据与真实场景脱节的核心问题,而 Kepler-OmniTac™ 凭借于 “硬件 - 数据 - 模型” 端到端原生打通:硬件实时采集不卡顿,数据管线秒级处理无延迟,模型原生适配力触觉模态,三者形成高效闭环,大幅减少人工参与,快速完成 “采集 - 处理 - 训练 - 迭代” 全流程。率先实现 “干活即采数、采数即训练、训练即进化” 的革命性突破,彻底打破行业 “采集 - 训练 - 部署” 割裂的痛点。
我们的优势不止于技术逻辑,更在汽车、3C 等真实产线得到验证
产线实测:从能用,到好用
汽车精密装配:1000 次零失误,成功率 98%
- 行业痛点:传统遥操作数采与虚拟 纯视觉数据难以精准还原精密装配的力控细节与真实场景,采集数据适配性差,泛化成功率仅 25%-30%,导致机器人实际作业易卡滞、错位,依赖人工补位,效率低、成本高;
- 我们的突破:VTLA 模型通过六维力传感器 + 触觉反馈,动态修正姿态,实现亚毫米级精准对齐,采集数据与实际作业场景 1:1 匹配;
- 落地数据:某汽车工厂 1000 次连续装配,成功率达 98%,较虚拟 纯视觉数据的 25%-30% 泛化成功率实现质的飞跃,产线产能提升 30%,人工成本降低 40%,大幅减少人工干预。

多材质抓取:零滑落,成功率 99%
- 行业痛点:传统遥操作数采与虚拟 纯视觉数据无法精准捕捉不同材质零件的受力差异与真实场景特性,采集数据通用性差,机器人抓取时易出现抓碎、滑落问题,人工干预率高,几乎不具备实用价值;
- 我们的突破:VTLA 模型通过力触觉实时反馈,动态调节抓取力度(重物抓牢、轻物轻柔、易碎品控力),采集数据覆盖全场景材质特性与复杂环境;
- 落地数据:某制造工厂多品种小批量零件抓取及放置,抓取成功率 99%,连续作业零滑落。
开普勒 K2 大黄蜂目前已成功实现自主拆垛,显著降低人工干预,推动产线自动化升级,彻底解决纯视觉与虚拟数据的实用化难题。

四、从人工采集,到自主成长,补齐感知短板
传统遥操作数采与虚拟 纯视觉数据仅解决 “数据怎么采”,但无法解决 “数据怎么用、机器人怎么升级” 的核心问题;而我们的方案实现全链路高效闭环:
- 对企业:无需额外投入采集时间与大量人工成本,机器人自主进化,持续降低产线试错成本与人工干预,摆脱对低泛化率数据的依赖;
- 对行业:打破 “人工依赖型数采” 与 “虚拟数据脱节场景” 的双重瓶颈,用 “力触觉 + 视觉” 双驱动的自主成长模式,让机器人真正适配工业场景的复杂多变,这也是我们能在汽车、3C、物流等行业快速落地的核心原因。
- 补齐感知短板:首次实现 “视觉 + 力触觉” 全维度物理感知,让机器人不止 “看见”,更能 “触摸真实”,解决遮挡、反光、柔性物体等场景失效问题;
- 降低数据门槛:提供开箱即用的工业力触觉数采方案,大幅降低企业获取高保真交互数据的成本与周期,加速具身智能迭代;
- 加速场景落地:原生适配 VTLA 模型,数据与模型深度协同,提升机器人在精密制造、汽车装配、物流分拣等场景的作业精度与稳定性,助力工业人形机器人规模化商用。
五、以数据为芯,从工业出发,向万物智能延伸
开普勒深耕工业人形机器人领域,旗下 K2 “大黄蜂” 机器人已在工业制造、物流作业、高空作业等场景完成稳定验证。本次力触觉全栈数采方案的发布,是公司从 “硬件研发” 向 “硬件 + 数据 + 模型” 全栈智能公司升级的关键一步。
未来,开普勒将立足工业、跳出工业,持续迭代 VTLA 模型与力触觉数采体系,以工业级高可靠能力为根基,不断拓展全场景智能边界;联合生态伙伴共建「场景 - 数据 - 模型」正向循环,让机器人真正具备人类级物理感知与交互能力,从赋能智能制造,走向服务万物智能。

- 乐高集团"世界玩乐节"活动登陆上海,开启全城玩乐模式
- DKSH资助新疆公益助残项目 为残障人士送祝福
- 【运德莱油漆——色彩批发专家,定制您的专属色彩世界】
- 上海高金与嘉信理财联合发布第三年度《中国居民金融素养报告》
- 香港股票分析师协会24周年志庆暨第14届上市公司年度大奖2025
- 全球视野,虹桥机遇 上海外服亮相首届海外投资与综合服务展洽会
- 玩美移动(Perfect Corp)为品牌与零售商网站、应用及API推出新一代生成式AI虚拟试衣技术
- MAMMUT猛犸象官宣全球品牌代言人张若昀
- 中国国家药品监督管理局批准威络益(佐妥昔单抗)一线治疗晚期胃或胃食管交界处腺癌
- 感恩「浴」见 美好相伴 德国高仪汲取善水之力传递爱与温暖
- Supermicro推出全新Data Center Building Block Solutions®,可简化并加速全球规模的AI/IT液冷数据中心建设
- 科济药业美国临床试验暂停已被FDA解除
- 创新发展再启航 EDDY成立20周年庆典
- Polyhedra与谷歌云达成合作,向全球开发者开放Proof Cloud服务
- 中国建材产业:创新驱动,构建绿色未来
- 连点成线,筑梦前行,马石油携手DMD少年开启“马石油五十个梦想计划”
- Simmons®席梦思甜梦传“绮”沪上启幕,百年匠心续写睡眠传奇
- DHL集团与Temu签署谅解备忘录,赋能成熟和新兴市场内中小企业发展
- 霍尼韦尔为海信提供环境友好型制冷剂Solstice® 454B (R-454B) 助力制冷行业可持续发展
- 美通社2026新传播年度大奖征集启动,聚焦“重思”与“重塑”
- 情系果农,助力振兴丨新疆大坚果专家疆果果为果农撑起一片天
- 维塑科技选择亚马逊云科技为首选云服务供应商
- SCIEX官宣:7500+旗舰质谱系列将在中国本土化生产
- 2026带状疱疹行动月:承千年智慧探寻春防有“方”,多方聚力共建“高疹”联防
- Lanvin Group(复朗集团)市场变局中驱动创意赋能、加速运营升级
- 迪哲医药舒沃哲®获FDA加速批准上市,系全球首款在美获批的EGFR exon20ins非小细胞肺癌国创新药
- 英国气泡水品牌 LOVEAU莱福澳 沁爽果味 一点都不甜
- 库斯家居“星火计划”首店贵州桐梓店盛大开业
- Stavian Industrial Metal在2024 SEAISI会议和展览致力于可持续增长并扩大国际联系
- 第三届中国国际供应链促进博览会开幕式在京成功举办
推荐
-
 我们时常把创业想得太过简单,认为获得成功轻而易举
我们时常把创业想得太过简单,认为获得成功
财商
我们时常把创业想得太过简单,认为获得成功轻而易举
我们时常把创业想得太过简单,认为获得成功
财商
-
 为何娃哈哈纯净水线上会卖断货?
随着网络上关于娃哈哈和农夫山泉之争的持续
财商
为何娃哈哈纯净水线上会卖断货?
随着网络上关于娃哈哈和农夫山泉之争的持续
财商
-
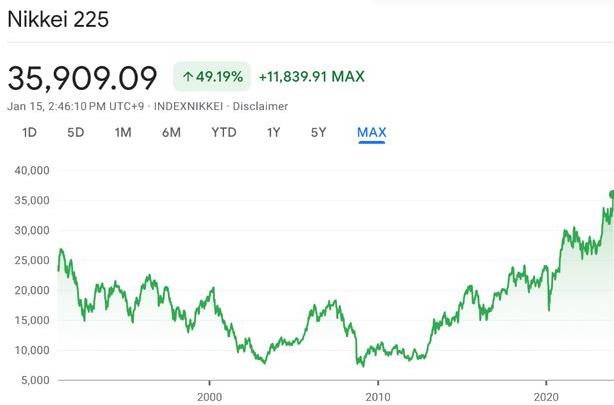 日股盘中再破34年新高,今年还涨得动吗?
今年日股开局强势,1月5日以来开启连涨行情,日
财商
日股盘中再破34年新高,今年还涨得动吗?
今年日股开局强势,1月5日以来开启连涨行情,日
财商
-
 春节将至,抢票再次成为广大网友关注的热门话题
春节将至,抢票再次成为广大网友关注的热门话
财商
春节将至,抢票再次成为广大网友关注的热门话题
春节将至,抢票再次成为广大网友关注的热门话
财商
-
 供应“安全感”超过红海“危机感”?欧洲天然气价格大跌
虽然冬季极寒天气来临,而且卡塔尔似乎已经暂
财商
供应“安全感”超过红海“危机感”?欧洲天然气价格大跌
虽然冬季极寒天气来临,而且卡塔尔似乎已经暂
财商
-
 娃哈哈这艘商业巨舰将驶向何方,我们试目以待
2月25日,娃哈哈集团在官网发布讣告,娃哈哈创
财商
娃哈哈这艘商业巨舰将驶向何方,我们试目以待
2月25日,娃哈哈集团在官网发布讣告,娃哈哈创
财商
-
 广东省药监局调研恒昌医药集团,聚焦药品流通产业高质量发展
日前,广东省药品监督管理局党组成员、副
财商
广东省药监局调研恒昌医药集团,聚焦药品流通产业高质量发展
日前,广东省药品监督管理局党组成员、副
财商